Łapanie lwów górskich
Quinton Martin to lider zespołu zajmującego się lwami górskimi w Audubon Canyon Ranch (ACR) w północnej Kalifornii. Jego zadaniem było łapanie lwów górskich aby oznaczyć je czujnikami GPS które miały dostarczyć danych niezbędnych do badań. Niestety tradycyjne pułapki nie były wystarczająco skuteczne.
Dawne metody łapania lwów
Tradycyjna pułapka składała się z klatki z tylko jednym wejściem oraz przynętą która miała zwabić kota do środka. Gdy zwierzę znajdowało się w środku czujnik nacisku wyzwalał system zamykania klatki. Taka metoda miała dwie zasadnicze wady:
Łapać więcej lwów górskich
Lwy górskie bardzo często chodzą tymi samymi ścieżkami, badacze korzystając z krzaków i patyków byli w stanie tworzyć lejki które prowadziły bezpośrednio do klatek które miały dwa końce otwarte. Dużo łatwiej przekonać zwierzę do wejścia do klatki jeśli widzi, że może przez nią swobodnie przejść. Takie podejście eliminuje potrzebę korzystania z przynęty.
Wyzwaniem okazało się stworzenie systemu który jednocześnie zamykałby oba końce klatki kiedy przechodzący lew będzie w środku.
System zamykania drzwi w nowym projekcie był bardzo prosty, drzwi na obu końcach klatki umieszczone były w pionowych prowadnicach i trzymane na drążkach. Po wyciągnięciu drążków drzwi opadały zamykając klatkę.
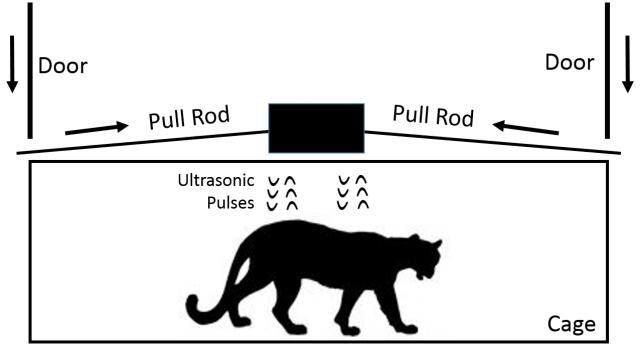
Schemat klatki
Solenoid wysokiej mocy ciągnie płytę która przymocowana jest do obu drążków. System jest sterowany poprzez mikrokontroler Arduino Uno, natomiast uruchomienie solenoidu obywa się przez przekaźnik wysokoprądowy.
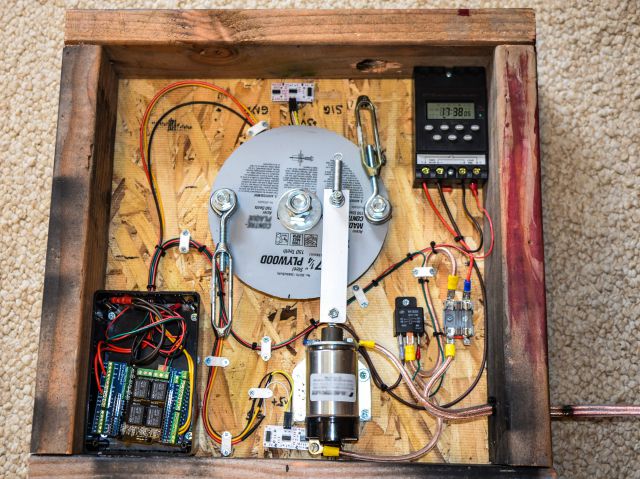
Prototyp mechanizmu zamykającego klatkę
Projekt systemu
Założeniem systemu było wykrywanie ruchu lwa górskiego jednocześnie pomijając mniejsze zwierzęta. Testowanych było kilka rozwiązań m.in. poziome sensory fotoelektryczne i czujniki ultradźwiękowe. Czujniki fotoelektryczne działały prawidłowo, ale były trudne do zainstalowania i wymagały dużej ilości przewodów. Ostatecznie wybór padł na mniej inwazyjne czujniki ultradźwiękowe instalowane na górze klatki.
Mierząc odległość od dachu klatki do zwierzęcia możemy tak ustawić czujnik aby mechanizm wyzwalał się tylko na wysokich zwierzętach (przeciętny lew górski ma przynajmniej 50 cm wysokości). System posiadał dwa czujniki oddalonych od siebie o 35 cm i wyzwoli się tylko wtedy kiedy oba czujniki wykryją obiekt przynajmniej 50 cm wysoki. Takie rozwiązanie minimalizuje szanse złapania mniejszych zwierząt np. lisów które obwąchiwałby górę klatki.
Wdrożenie
Po ustaleniu głównych założeń projektowych następnym etapem było napisanie, a następnie debugowanie kodu kontrolującego mechanizm sterujący, co ukazało się niełatwe. Niezgrane ze sobą w czasie sensory kolidowały sobie nawzajem. Potrzebne było narzędzie które pozwoli debugować system w terenie – nowa niskobudżetowa seria oscyloskopów 1000X okazała się być właściwym narzędziem. Dwa kanały oscyloskopu pozwoliły równocześnie obserwować sygnały z dwóch sensorów co dało możliwość odpowiedniego ich dostrojenia.
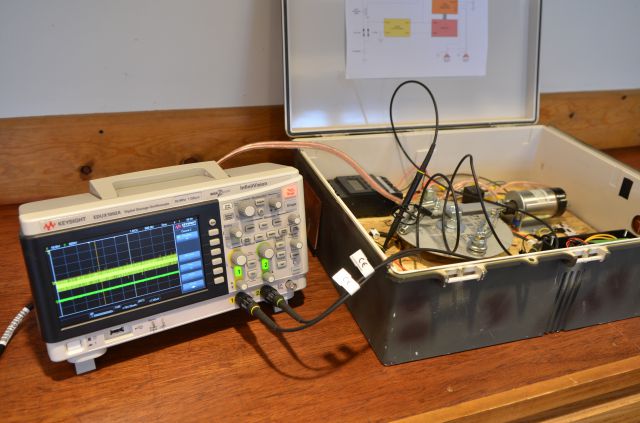
Keysight EDUX1002A podczas debugowania

Montaż systemu (zdjęcia autorstwa Jima Codingtona)
Lwy górskie żyją na bardzo rozległych terytoriach więc łapanie ich wymaga dużo cierpliwości. Po dwóch tygodniach od wdrożenia nowego rozwiązania udało złapać się pierwszą samicę lwa, a dwa dni później pierwszego samca.

Złapana samica lwa górskiego
Tekst oryginalny autorstwa Neila Martina - Corporate Marketing Director
Więcej na temat ACR Mountain Lion project https://www.egret.org/acr-mountain-lion-project
Dawne metody łapania lwów
Tradycyjna pułapka składała się z klatki z tylko jednym wejściem oraz przynętą która miała zwabić kota do środka. Gdy zwierzę znajdowało się w środku czujnik nacisku wyzwalał system zamykania klatki. Taka metoda miała dwie zasadnicze wady:
- Nie wystarczająco kusząca przynęta. Na terenach gdzie jedzenia jest pod dostatkiem lwy nie są na tyle głodne aby ryzykować wejściem do klatki. Dodatkowo pojawiały się problemy z dostarczaniem lwich smakołyków np. jelenie po wypadkach drogowych.
- Łapanie nie tych zwierząt. Często w pułapkę wpadały mniejsze zwierzęta jak lisy czy rysie.
Łapać więcej lwów górskich
Lwy górskie bardzo często chodzą tymi samymi ścieżkami, badacze korzystając z krzaków i patyków byli w stanie tworzyć lejki które prowadziły bezpośrednio do klatek które miały dwa końce otwarte. Dużo łatwiej przekonać zwierzę do wejścia do klatki jeśli widzi, że może przez nią swobodnie przejść. Takie podejście eliminuje potrzebę korzystania z przynęty.
Wyzwaniem okazało się stworzenie systemu który jednocześnie zamykałby oba końce klatki kiedy przechodzący lew będzie w środku.
System zamykania drzwi w nowym projekcie był bardzo prosty, drzwi na obu końcach klatki umieszczone były w pionowych prowadnicach i trzymane na drążkach. Po wyciągnięciu drążków drzwi opadały zamykając klatkę.

Schemat klatki
Solenoid wysokiej mocy ciągnie płytę która przymocowana jest do obu drążków. System jest sterowany poprzez mikrokontroler Arduino Uno, natomiast uruchomienie solenoidu obywa się przez przekaźnik wysokoprądowy.
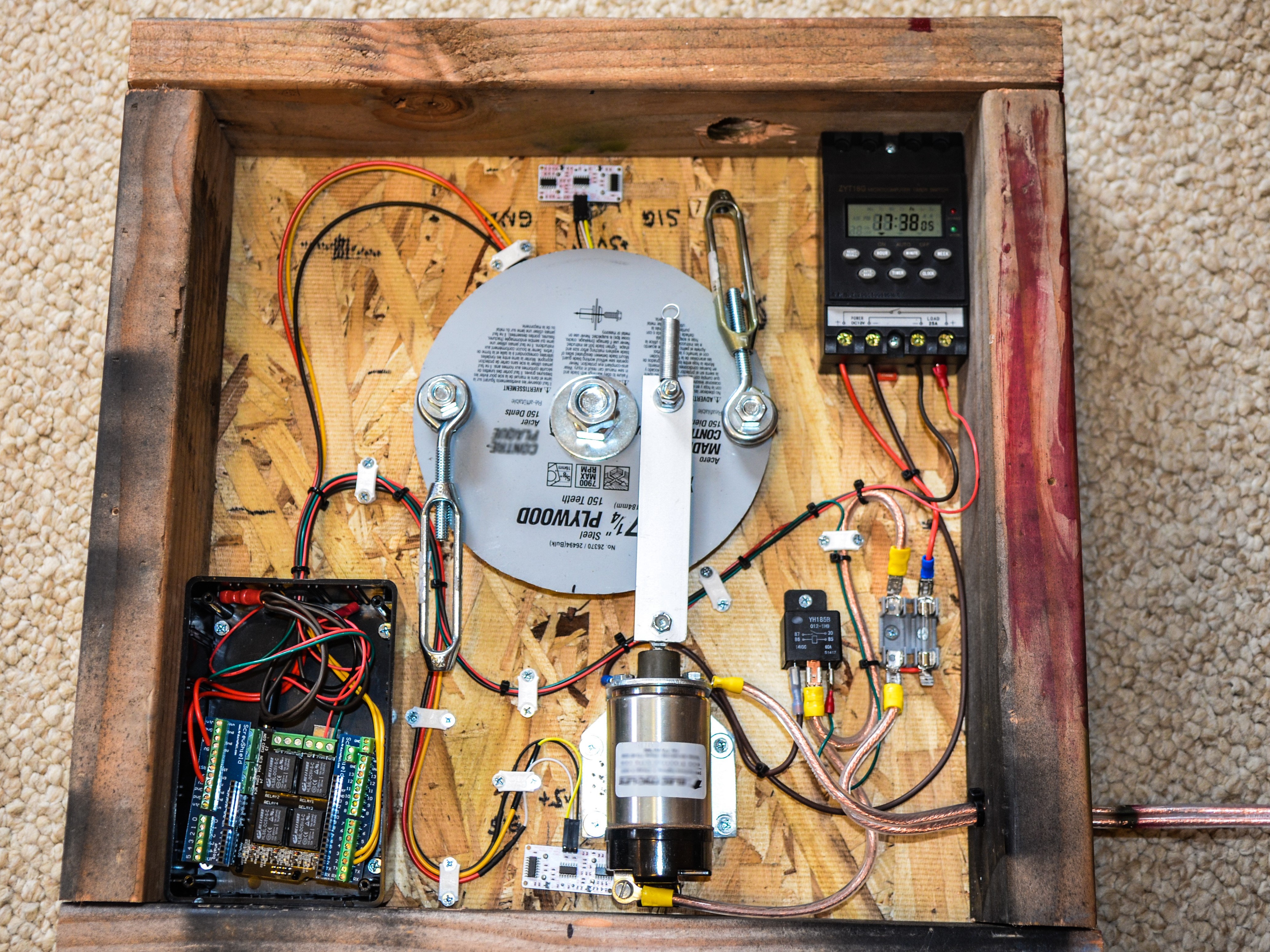
Prototyp mechanizmu zamykającego klatkę
Projekt systemu
Założeniem systemu było wykrywanie ruchu lwa górskiego jednocześnie pomijając mniejsze zwierzęta. Testowanych było kilka rozwiązań m.in. poziome sensory fotoelektryczne i czujniki ultradźwiękowe. Czujniki fotoelektryczne działały prawidłowo, ale były trudne do zainstalowania i wymagały dużej ilości przewodów. Ostatecznie wybór padł na mniej inwazyjne czujniki ultradźwiękowe instalowane na górze klatki.
Mierząc odległość od dachu klatki do zwierzęcia możemy tak ustawić czujnik aby mechanizm wyzwalał się tylko na wysokich zwierzętach (przeciętny lew górski ma przynajmniej 50 cm wysokości). System posiadał dwa czujniki oddalonych od siebie o 35 cm i wyzwoli się tylko wtedy kiedy oba czujniki wykryją obiekt przynajmniej 50 cm wysoki. Takie rozwiązanie minimalizuje szanse złapania mniejszych zwierząt np. lisów które obwąchiwałby górę klatki.
Wdrożenie
Po ustaleniu głównych założeń projektowych następnym etapem było napisanie, a następnie debugowanie kodu kontrolującego mechanizm sterujący, co ukazało się niełatwe. Niezgrane ze sobą w czasie sensory kolidowały sobie nawzajem. Potrzebne było narzędzie które pozwoli debugować system w terenie – nowa niskobudżetowa seria oscyloskopów 1000X okazała się być właściwym narzędziem. Dwa kanały oscyloskopu pozwoliły równocześnie obserwować sygnały z dwóch sensorów co dało możliwość odpowiedniego ich dostrojenia.
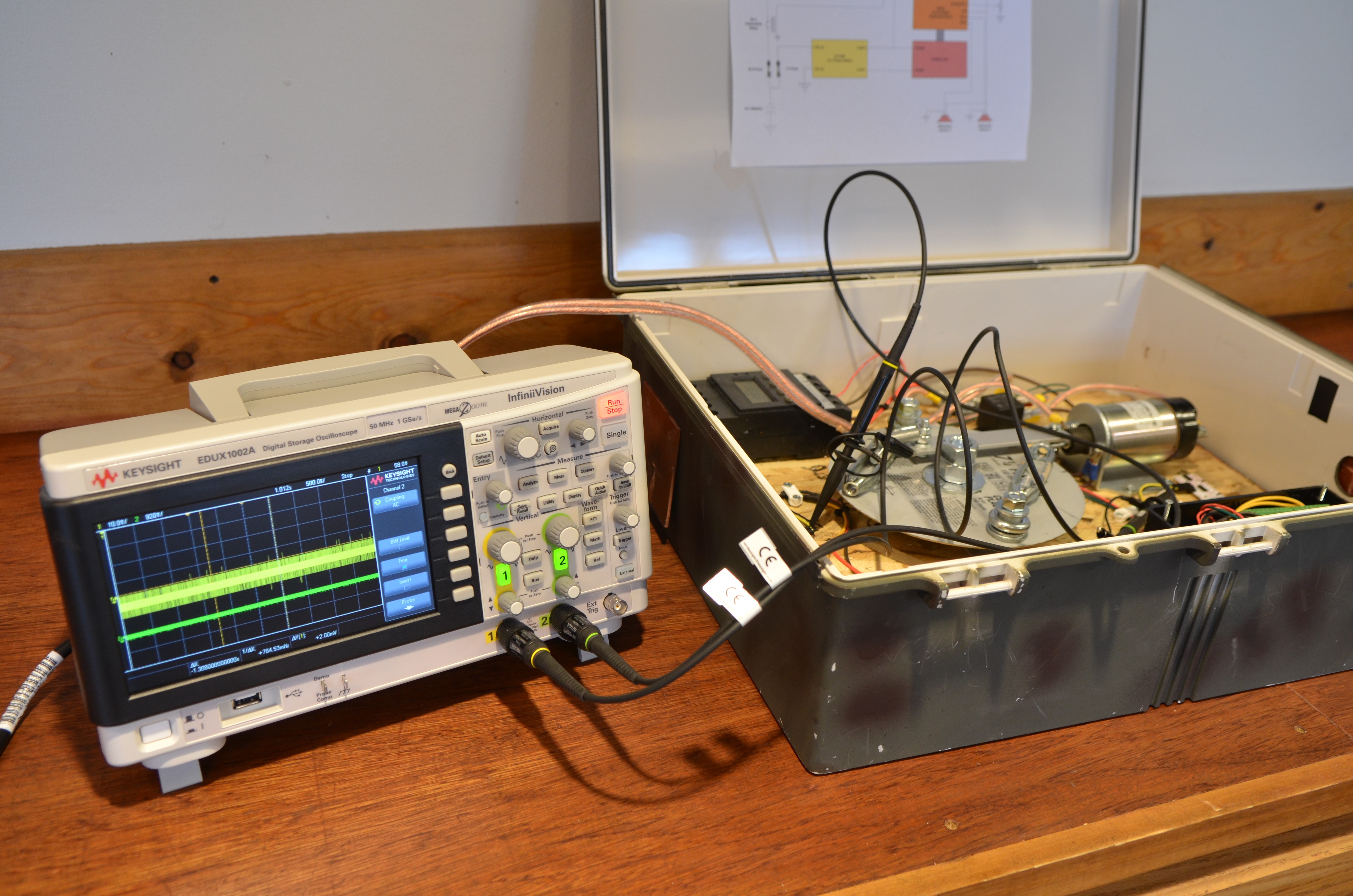
Keysight EDUX1002A podczas debugowania

Montaż systemu (zdjęcia autorstwa Jima Codingtona)
Lwy górskie żyją na bardzo rozległych terytoriach więc łapanie ich wymaga dużo cierpliwości. Po dwóch tygodniach od wdrożenia nowego rozwiązania udało złapać się pierwszą samicę lwa, a dwa dni później pierwszego samca.

Złapana samica lwa górskiego
Tekst oryginalny autorstwa Neila Martina - Corporate Marketing Director
Więcej na temat ACR Mountain Lion project https://www.egret.org/acr-mountain-lion-project
